Short assignment 2 - find the equation of the line passing through the projection centre and an image point, when the camera is in a known pose
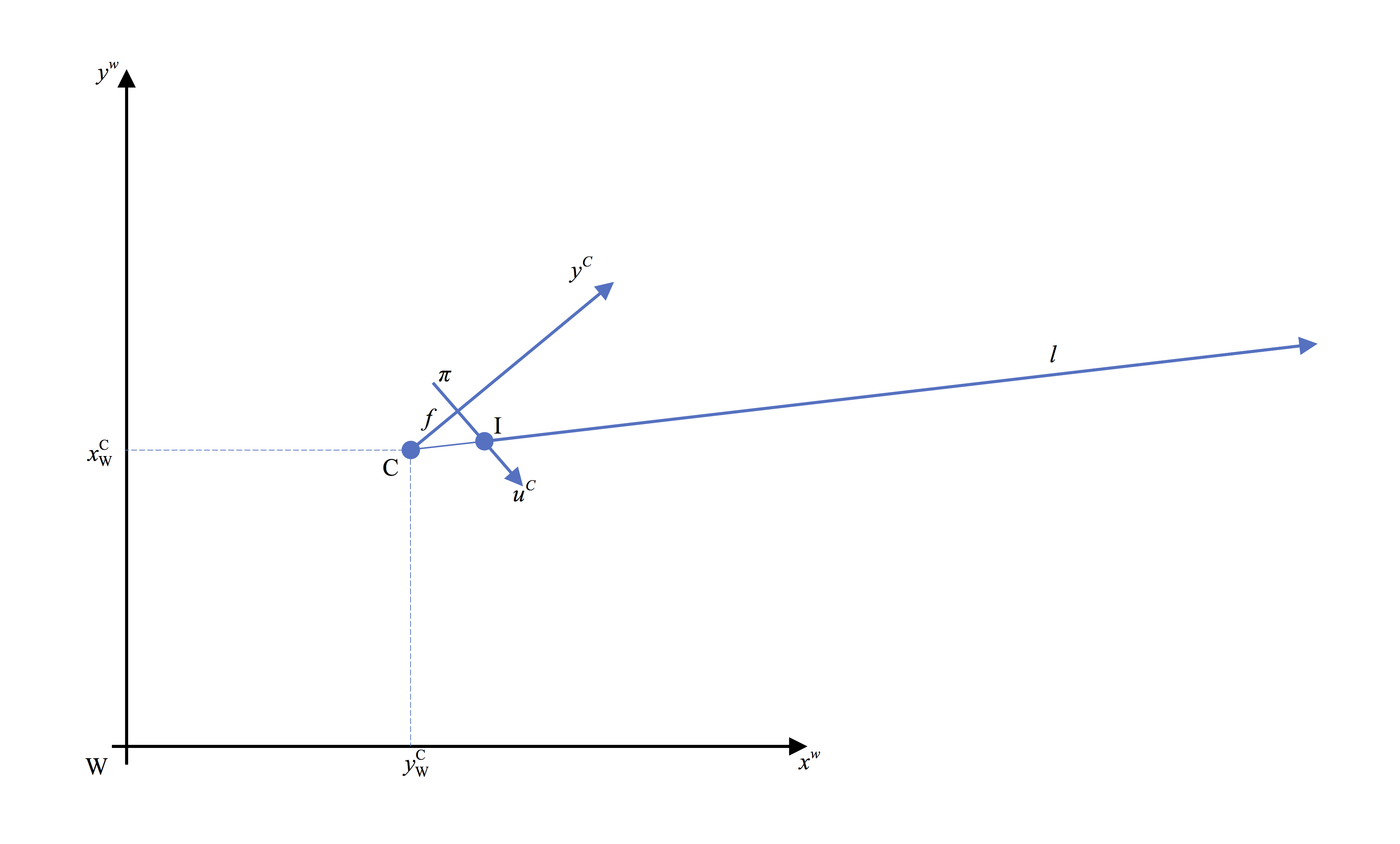
You have a 2D camera in a known pose in the 2D plane, i.e., the projection centre is in a known position w.r.t. the world reference frame, and the camera Y axis, i.e., the optical axis, is in a known orientation w.r.t. the X axis of the world reference frame.
Determine the equation, w.r.t. the world reference frame, of the line l, which passes through the projection centre C and an image point I of coordinate u.
Please use the standard robotics notation instead of the one mentioned in the Forsyth-Ponce, i.e., put on the bottom right the name to which the variable is referring and on the top right the reference frame into which the variable is living in (in place of the reference frame into which the variable is living in being on the top left of the variable name). Example: use \( x_C^W \) in place of \( {}^Wx_C \)).
Even though the editing is expected to be very simple, I suggest you to use Latex so to focus more on the content and less on the formatting. If you still do not know Latex, note that you can find many different graphical interfaces to speed you up with the simple text and equations required for this assignment, under different OSs. In case you might ask in the forum for suggestions.
The figure has errors in the sub/super scripts, and the \( x \) and \( y \) world coordinates; you might enjoy finding them (before I correct the figure)!
The deadline for the assignment is set on Wed. 13 October 2021 at 11:00.