Short assignment 3 - determine whether the pose of the observer can be fixed from the images of the known endpoints of a segment
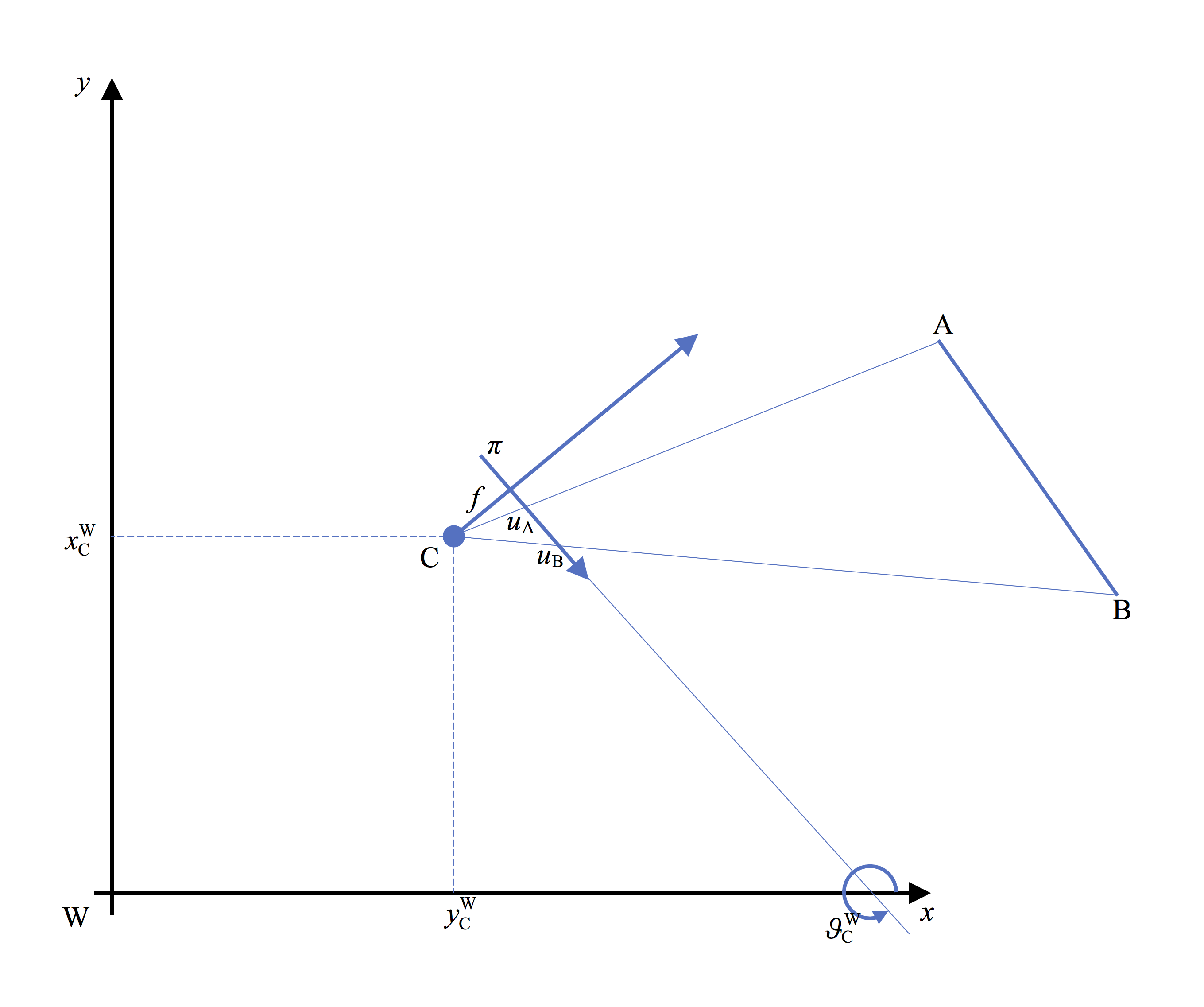
You have a 2D camera in an unknown pose in the 2D plane, i.e., the projection centre is in an unknown position w.r.t. the world reference frame, and the camera u axis, i.e., the image plane axis, is in an unknown orientation w.r.t. the x axis of the world reference frame.
Determine whether the observer, i.e., the camera, can localize itself w.r.t. the world reference frame, by knowing the world coordinates of the endpoints A and B of a segment (xWA, yWA) and (xWB, yWB), as well as the corresponding image coordinates uA and uB. Suppose that A and B can be distinguished by means of some characteristics of them, which can in turn be perceived by an image processing software.
The answer is expected first in terms of the number of unknowns w.r.t. the number of equations or similar analytical evaluations. A graphical / intuitive explanation of the outcome is useful only after having determined the outcome analytically.